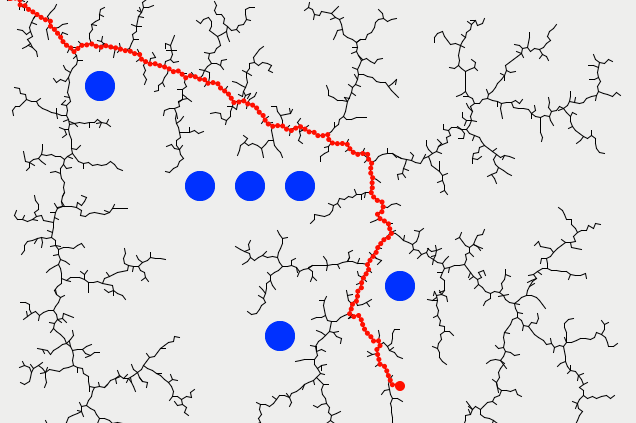
RRT (Rapidly Exploring Random Trees) Path Planning Algorithm
This project includes the implementation of RRT (Rapidly exploring Random Trees) path planning algorithm in Python and C++. The code has been documented for better readability and understanding. The start, goal and obstacle co-ordinates can be changed from within the code itself.
Python
The RRT Python folder contains the python file of the algorithm.
Dependencies
Running code via command line
- Change directory to where the code file is
- Execute command -
python rrt_python.py
C++
The RRT C++ folder contains the C++ files of the algorithm. It also contains the Eigen and Matplotlibcpp library files required for the project
Dependencis
Running code via Termial (Ubuntu)
- Change the directory to where the code files are
- Execute command -
g++ main.cpp -I/path/to/Python.h/file -lpython-version. In my case, the command is -g++ main.cpp -I/usr/include/python3.8 -lpython3.8 - After successfully executing above command, execute command -
./a.out
Click here to access the code
Check out the RRT research paper here